Specifications
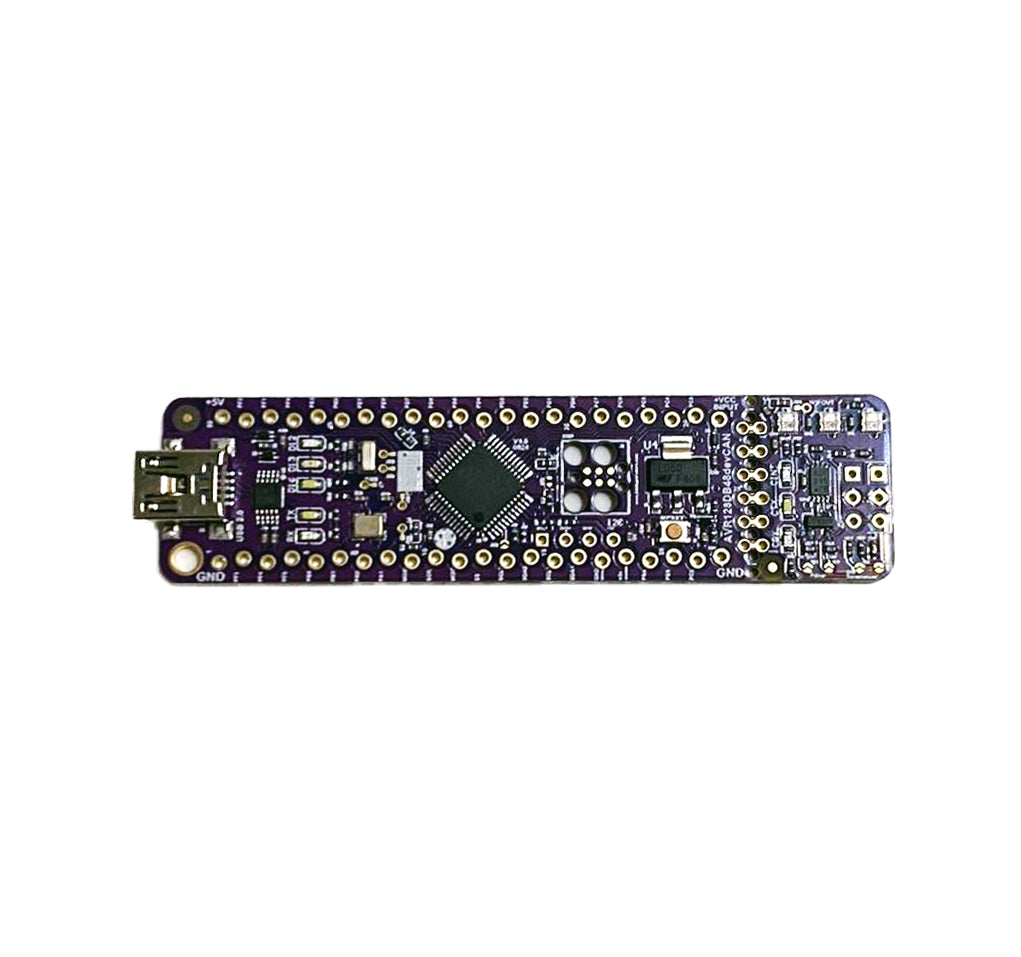
Curiosity Nano dev board with CAN integrated on the MCU
Built around the Microchip AVR128DB48 microcontroller with native classic CAN 2.0 on-die. No MCP2515, no TJA1050 transceiver shield, no SPI budget spent on CAN arbitration. Programmed via on-board USB-UPDI; works in Microchip Studio and MPLAB X with full step-debug, no external programmer.
Why this controller vs. the conventional setup
- CAN on the MCU — native classic CAN 2.0 controller on-die. Drop the MCP2515 from your prototyping stack; only a transceiver is needed for the physical layer.
- Curiosity Nano form factor — familiar layout for AVR developers; on-board UPDI debugger over USB.
- Six UARTs, two SPI, two I²C — broad peripheral mix for industrial protocol work.
- On-chip OPAMP — local analog signal conditioning without discrete op-amp chips. Useful for pressure-transducer / load-cell prototypes.
- Zero-Cross Detection — single-phase AC zero-cross handling without a separate comparator network. Pairs with the asynchronous TCD timer for triac / phase-control experiments.
- 12-bit DAC — analog setpoint output for closed-loop control prototypes.
- Operating range: 1.8–5.5 V — native interface to 3.3 V and 5 V logic without level shifters.
Specifications
- MCU: Microchip AVR128DB48 (AVR core, 8-bit)
- Flash / SRAM / EEPROM: 128 KB / 16 KB / 512 B
- Max clock: 24 MHz
- CAN: native, classic CAN 2.0 (CAN-FD not supported — AVR128DB48 family)
- UART / USART: 6
- SPI: 2
- I²C (TWI): 2
- Analog: on-chip OPAMP, Zero-Cross Detection, ADC with PGA, 12-bit DAC
- Timers: TCA (16-bit), TCB (multiple), TCD (asynchronous, motor-control oriented)
- Programming / debug: USB-UPDI on-board; full step-debug in Microchip Studio / MPLAB X
- Form factor: Curiosity Nano
- Origin: Designed and assembled in Pittsboro, NC
- Datasheet: full pinout, current budget, USB connector type, and Arduino board-manager URL available on request — contact us.
FAQ
Does this replace an MCP2515?
Yes. CAN is integrated into the MCU; no external SPI-to-CAN bridge needed. Only a transceiver is required for the physical layer.
Does it support CAN-FD?
No — classic CAN 2.0 only. For CAN-FD, look at the AVR DU family or an ARM alternative.
Can I use Arduino shields physically?
Headers are Arduino-compatible in layout. Library-level shield support depends on the AVR-core add-on you're using in the Arduino IDE (MegaCoreX, DxCore, or similar). Stick with Microchip Studio or MPLAB X if you need guaranteed AVR support.
Can I step-debug?
Yes — full step debugging via the on-board UPDI interface in Microchip Studio or MPLAB X. No external debugger needed.
Is this for production deployment?
No. Curiosity Nano format is for prototyping. Once your firmware is validated, lay out your own PCB with the bare AVR128DB48 MCU and the transceiver of your choice. The board's role is firmware-iteration speed, not BOM-level shipping.
Compliance & origin
- Origin: Assembled in Pittsboro, North Carolina, USA. Components are sourced from global suppliers; final assembly, firmware, and QC happen in the NC workshop.
- Form factor: Curiosity Nano development board; Arduino-style header layout.
- Support: ticket-based support direct from the people who built the hardware — open a ticket.
- Warranty & certifications: available on request — open a ticket for the current scope.
Documentation & warranty
Full technical datasheet, installation guide, and warranty terms are available on request. Ticket-based support direct from the manufacturer in NC.